
Click on the images to see blog posts about each research topic.
Basic research is important, but often it is difficult to publish useful methods if they are not beating the state of the art. However, doing things differently might have a value of its own. Especially, state of the art methods often are like the Swiss army knife, being able to cope with all kinds of situations. However, when the application in questions only requires a simple tool, it often turns out that a simplified and specialised tool performs better. In this section I present some of these tools that I have developed and it will be shown in what situations they can be useful.
Machine Learning
XAI is becoming more and more important and the following papers show how to perform efficient classification using a mathematically defined neural network.
Embedded Prototype Subspace Classification: A subspace learning framework
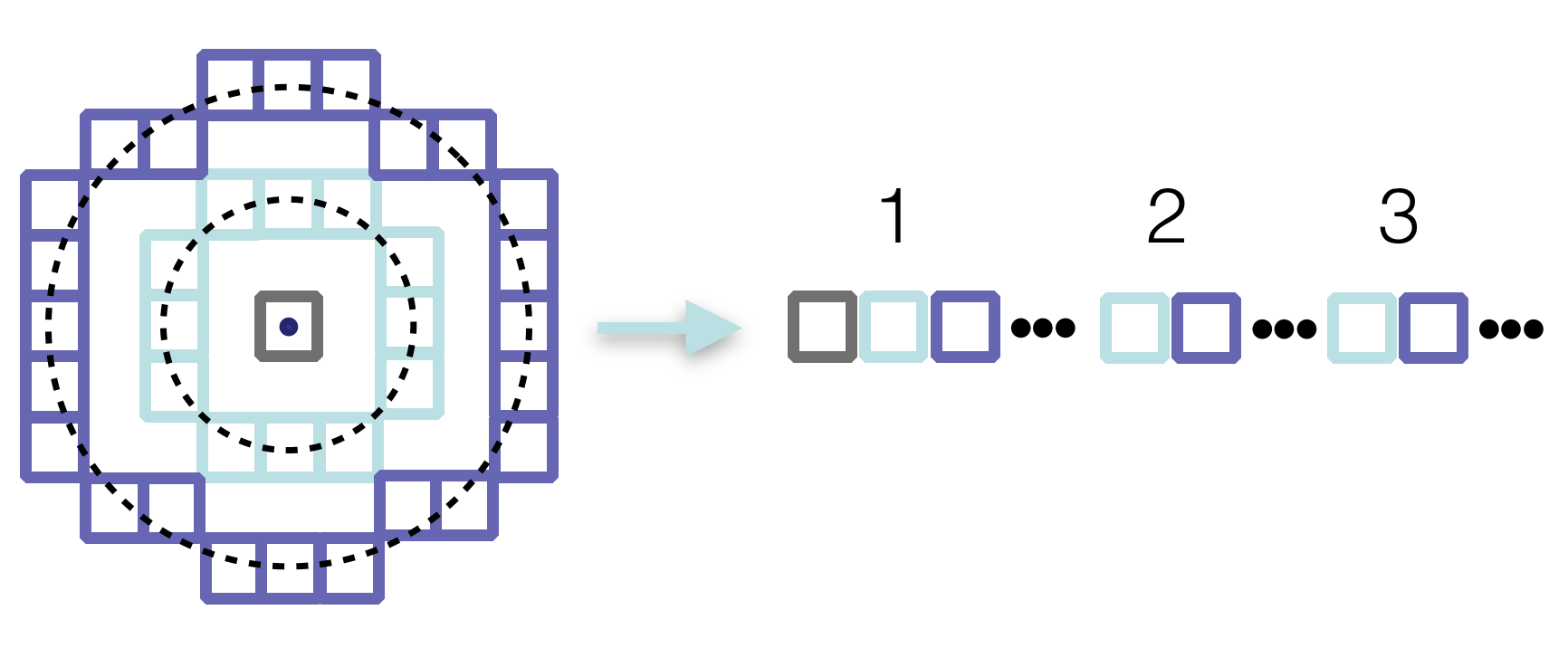
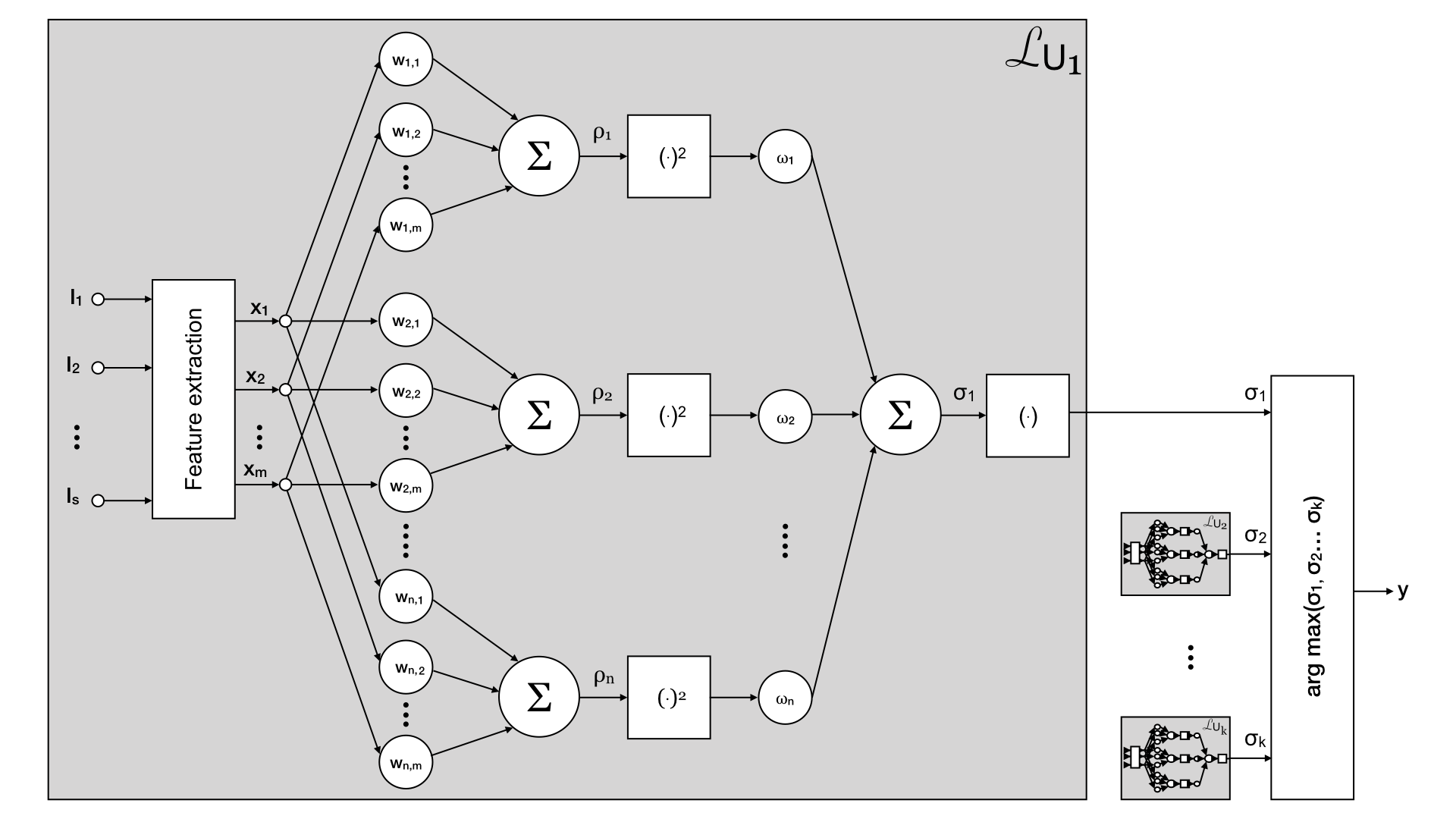 These papers present a learning approach that constructs a neural net which is completely mathematically defined through PCA. The whole learning process is visualisable. In fact it is based on a visualisation!
These papers present a learning approach that constructs a neural net which is completely mathematically defined through PCA. The whole learning process is visualisable. In fact it is based on a visualisation!
Ensembles and Cascading of Embedded Prototype Subspace Classifiers
![]() This paper extends on the previous paper by explaining how the neural processing can be more effective.
This paper extends on the previous paper by explaining how the neural processing can be more effective.
Image Derivatives
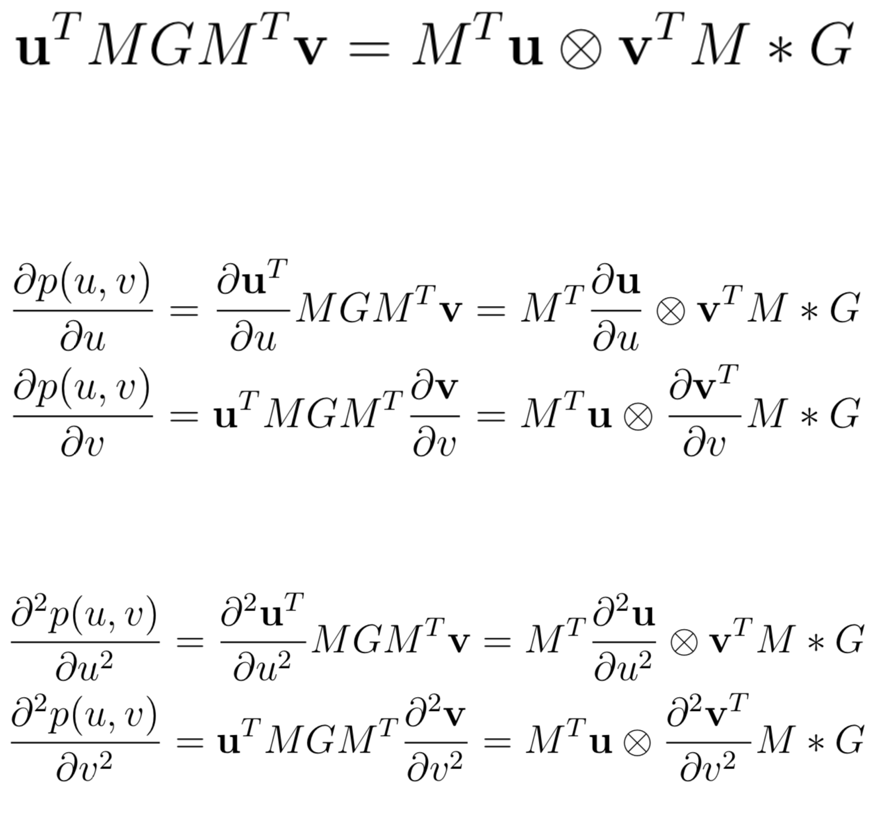 This paper propose an efficient way to combine different spline types for computing first and second order derivatives of images. It is shown that a spline surface can be rewritten as an outer product and a convolution. This gives a separable convolution kernel for computing derivatives of better quality than for instance the Sobel kernel.
This paper propose an efficient way to combine different spline types for computing first and second order derivatives of images. It is shown that a spline surface can be rewritten as an outer product and a convolution. This gives a separable convolution kernel for computing derivatives of better quality than for instance the Sobel kernel.
Key Point Detectors
I have been interested in finding new ways to compute key points. Harris finds corners, while the Determinant of Hessian finds blobs. But images are different and therefore contain more or less of the other. I mean that choosing a descriptor should ideally be independent on what key point detector to choose.
The Extended Structure Tensor with a Scale Space Parameter
 This paper extends the Harris corner detector by investigating the scale space dimension, i.e. the trace of the Hessian matrix. The point found will be close to the one of the Harris corner detector, but still different. There seem to be situations when this detector is more robust than the Harris, but the computational cost is bigger.
This paper extends the Harris corner detector by investigating the scale space dimension, i.e. the trace of the Hessian matrix. The point found will be close to the one of the Harris corner detector, but still different. There seem to be situations when this detector is more robust than the Harris, but the computational cost is bigger.
The Spinor Tensor
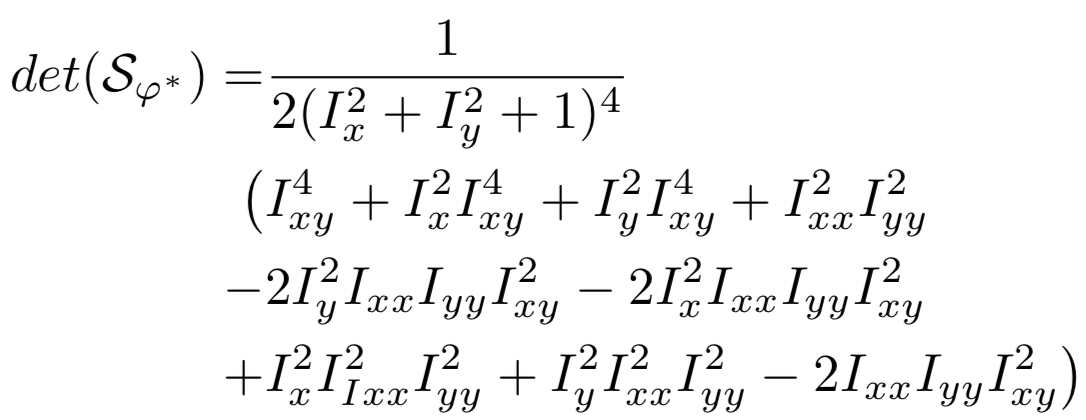
This paper investigates the use of the spinor tensor as the base for a key point detector, very much like the structure tensor and the Hessian is used for the same purpose.
Feature descriptors
We have publishes several different feature descriptors that all of them can use any key point detector. Their use is restricted to certain situations as their invariance to scale and rotation varies.
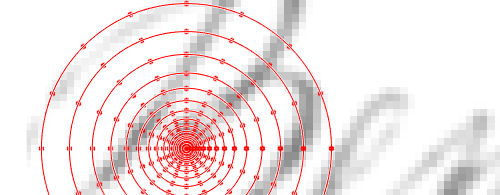
The Log-Polar Magnitude descriptor
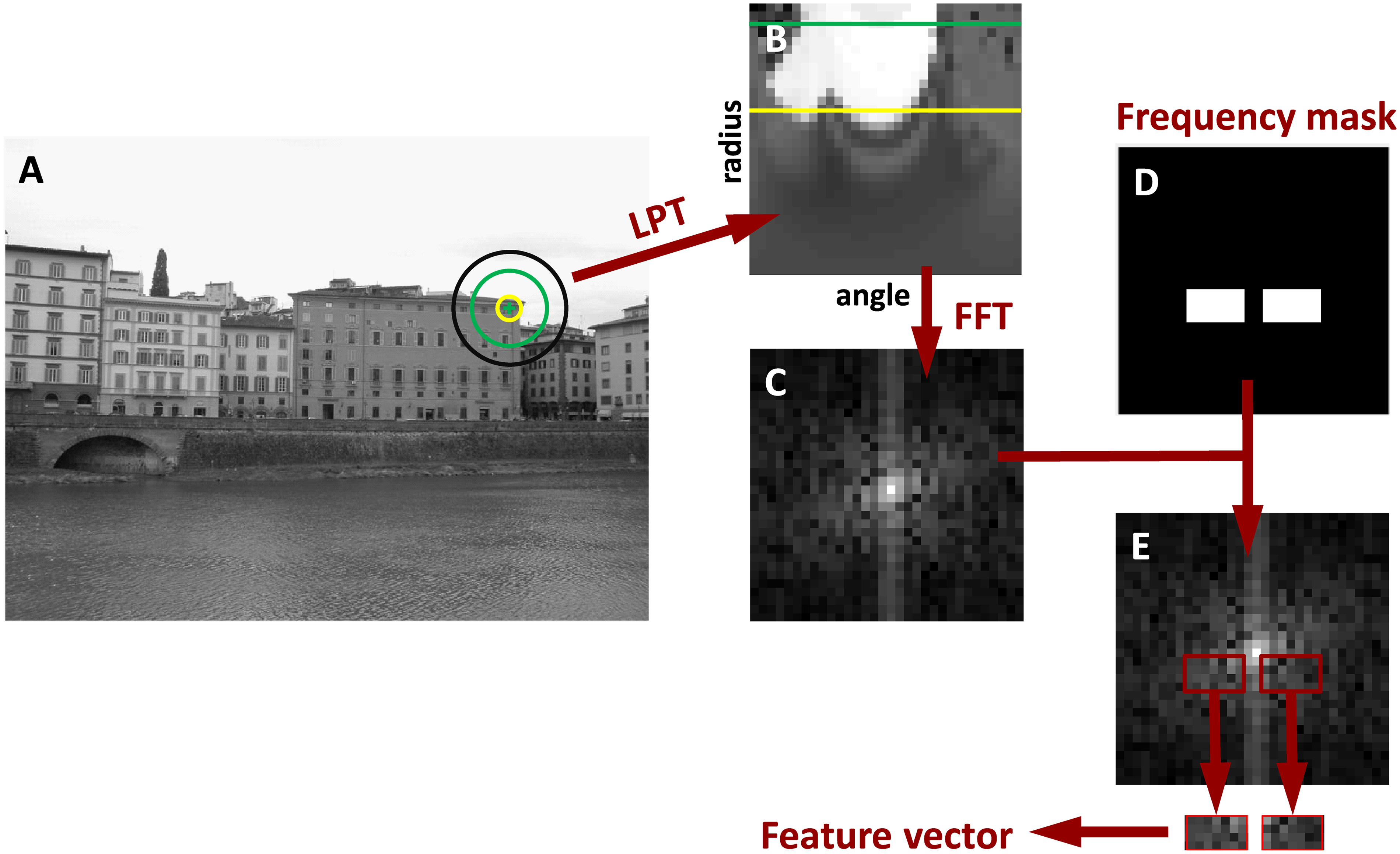 The idea proposed in this paper is to use a log polar sampling scheme followed by a FFT in order to make a rotation and to some degree scale invariant feature descriptor.
The idea proposed in this paper is to use a log polar sampling scheme followed by a FFT in order to make a rotation and to some degree scale invariant feature descriptor.
A Phase Correlation based descriptor
 This descriptor is based on Phase Correlation, but is less efficient than LPM. But it investigates the implementations of Log-Polar sampling and points out a common problem with contemporary implementations. The findings laid ground for the RLF.
This descriptor is based on Phase Correlation, but is less efficient than LPM. But it investigates the implementations of Log-Polar sampling and points out a common problem with contemporary implementations. The findings laid ground for the RLF.
A Phase based descriptor
 This paper propose to make the matching directly in the frequency domain and is the predecessor of LPM. It also discuss using the Periodic FFT instead of the FFT as well as a trick to improve the consensus check.
This paper propose to make the matching directly in the frequency domain and is the predecessor of LPM. It also discuss using the Periodic FFT instead of the FFT as well as a trick to improve the consensus check.
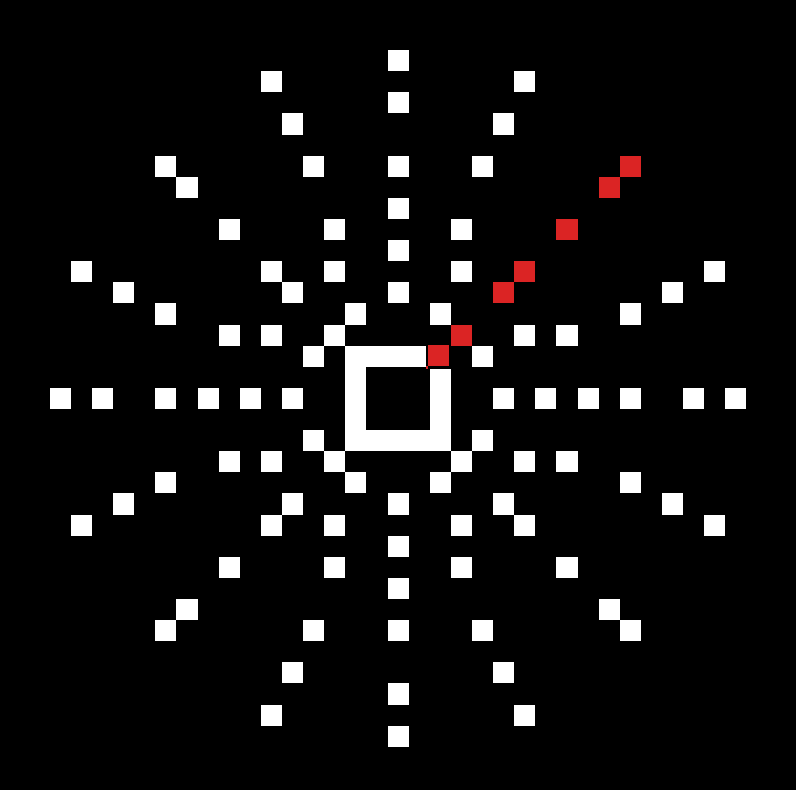
The Radial Line Fourier descriptor
 One of several improvements made to the word spotter was to use faster descriptor based on a few elements of the Fourier transform of radial lines with logarithmic sampling. This makes the descriptor much faster, but still robust enough. Actually, it must not be too precise as the shape of the words varies in the text.
One of several improvements made to the word spotter was to use faster descriptor based on a few elements of the Fourier transform of radial lines with logarithmic sampling. This makes the descriptor much faster, but still robust enough. Actually, it must not be too precise as the shape of the words varies in the text.
The Radial Line Integration descriptor
This is the predecessor to the RLF but is also valuable in its own right as it is the most simple descriptor I can imagine still being robust. It is not scale or rotation invariant though.
The M3 descriptor
This descriptor is very simple but not as robust as the RLF descriptor. However, the rotation invariant version is still interesting to use.
Outlier Removal
RANSAC is one of the most used an investigated method for outlier removal in the area of image matching using key points and feature detectors. The problem is that it is not deterministic as it is based on randomness. After all it is RANdom Sample Consensus. This irritated me so much I started to try to find deterministic alternatives so I could manipulate parameters in the pipeline and reliably being able to evaluate the result of the change without “drowning” in the noise of RANSAC.
Putative Match Analysis
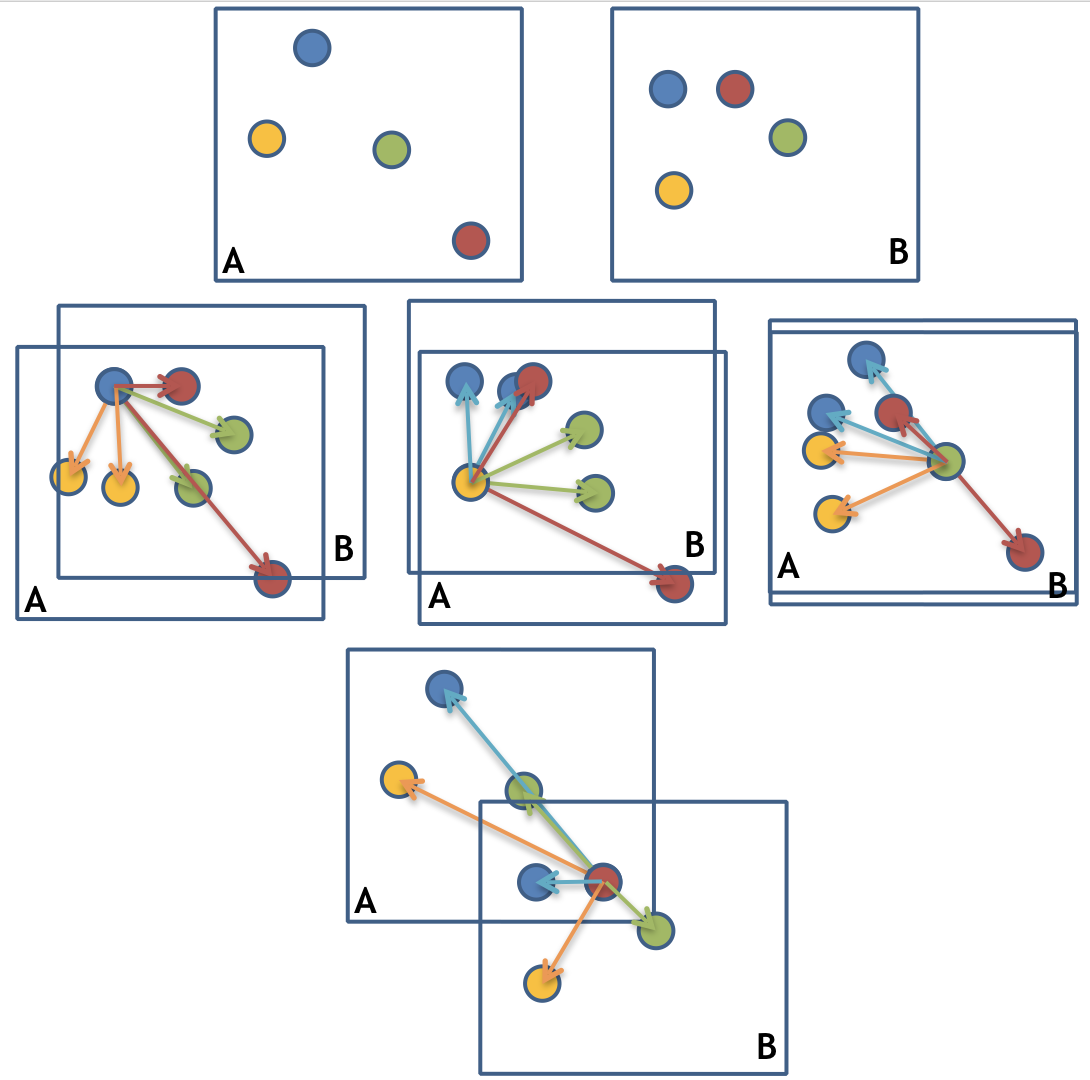
This paper propose a deterministic alternative to RANSAC that is rotation and scale invariant, but to a smaller extent large perspective differences. We used this in our first word spotter to remove word outliers.
Clustering
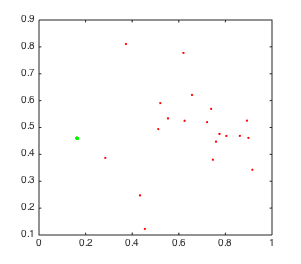 These two papers propose clustering as a deterministic alternative to RANSAC. The corresponding pairs of points can be rewritten as points in 2D space. The inliers will be found close to each other while the outliers will be found further away from the cluster, depending on how well the points correspond. We use this algorithm in our word spotter.
These two papers propose clustering as a deterministic alternative to RANSAC. The corresponding pairs of points can be rewritten as points in 2D space. The inliers will be found close to each other while the outliers will be found further away from the cluster, depending on how well the points correspond. We use this algorithm in our word spotter.
A deterministic RANSAC that finds the optimal set
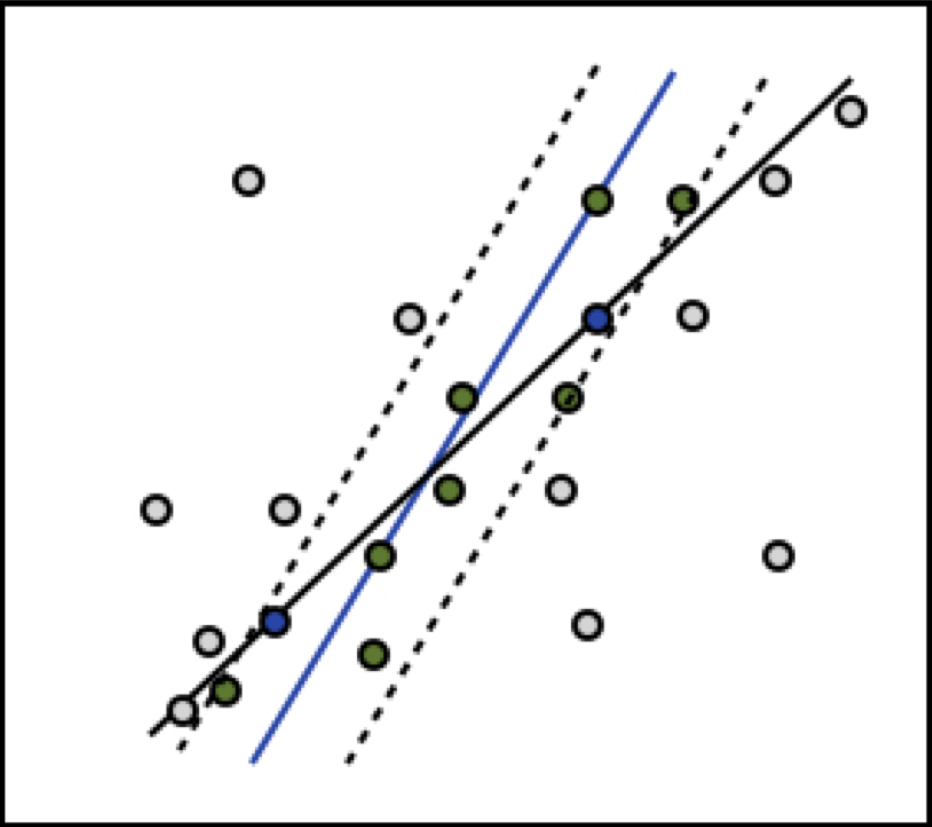 This is paper propose a deterministic version of RANSAC (if one model is at hand) that always will find the optimal set even if the data is heavily contaminated by outliers.
This is paper propose a deterministic version of RANSAC (if one model is at hand) that always will find the optimal set even if the data is heavily contaminated by outliers.
General Papers including several things from above
These papers make use of several of the findings regarding key point detectors, feature vectors and outlier removal.
An improved image stitching pipeline
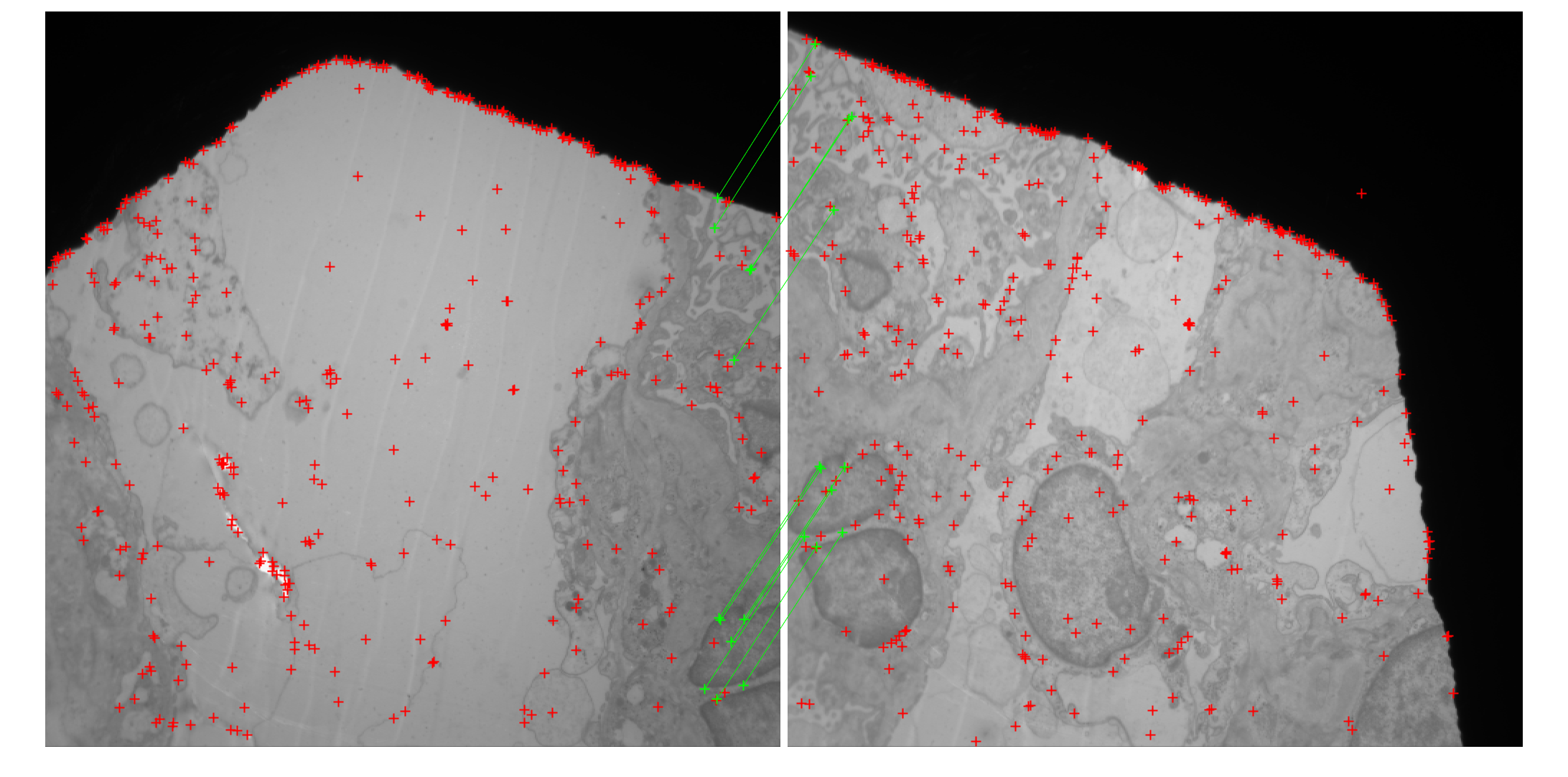
This paper includes improvements for the whole image stitching pipeline for microscopy image stitching. There are several insights to be find in this paper!
Parallel image stitching
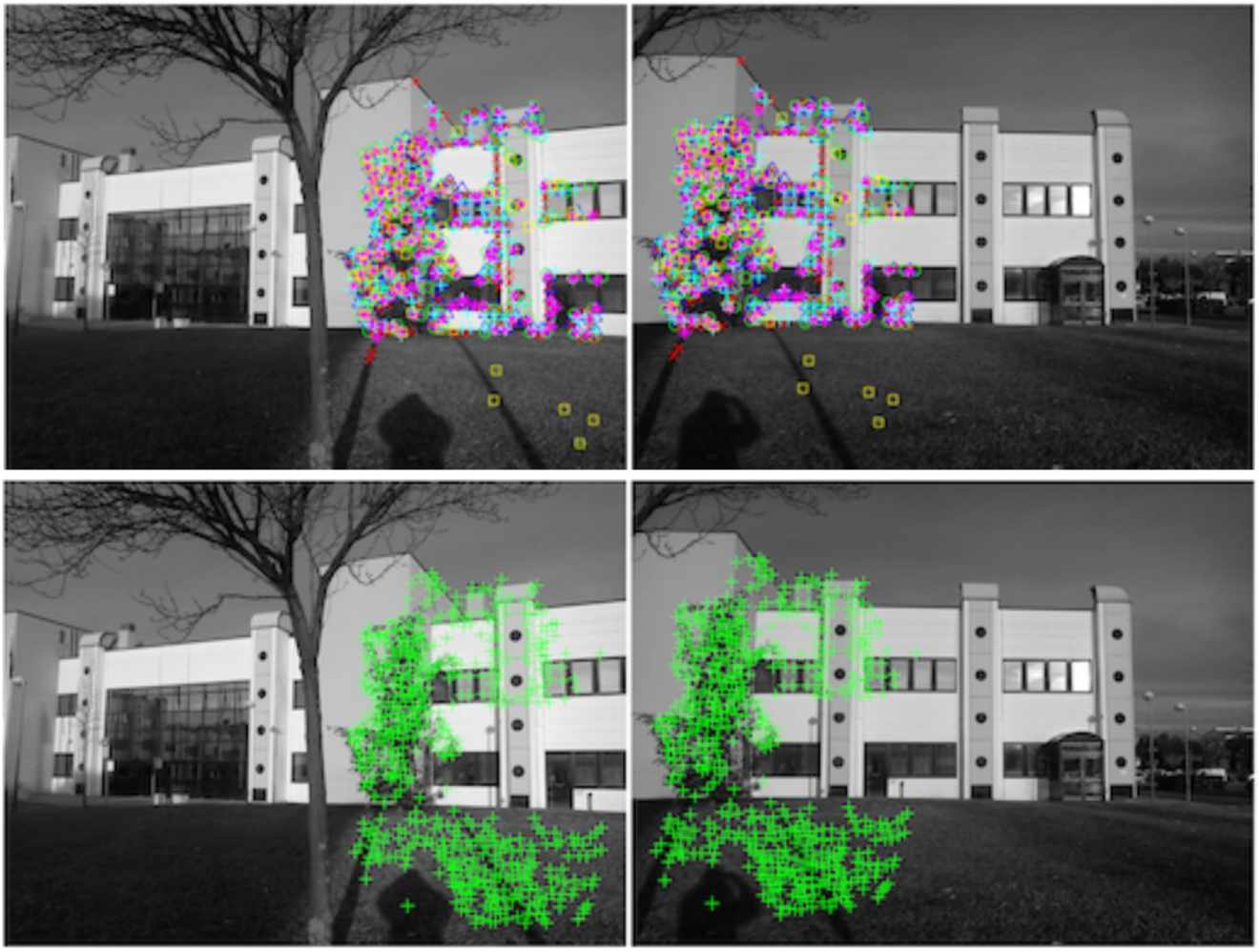
This paper discuss the advantages of using several different key point detectors run in parallel, together with separate matching.
